I am currently a visualization and operator interface developer for space robotics at the NASA Ames Research Center. I am developing the Visual Environment for Remote Virtual Exploration (VERVE) software for rover teleoperation on the Volatiles Investigating Polar Exploration Rover (VIPER) mission. I also worked on developing visualization and camera sequence planning software for the Mars Science Laboratory mission’s Curiosity rover. Previously, I facilitated the technology transfer of VERVE to Nissan’s Advanced Technology Center for integration with an autonomous vehicle fleet management system. I have also worked on a localization solution for the Geocam Space project to geolocate photos taken by astronauts aboard the International Space Station.
Prior to NASA, I was a Distinguished Member of the Technical Staff at Motorola Mobility, which became a Lenovo company as of 2015. My background is in robotics. The interdisciplinary nature of this field has provided me a unique perspective on solving the problems I have encountered during my tenure at Motorola. I have developed both hardware and software (in multiple languages and for multiple platforms.) I have worked in applied research and in advanced product development. My projects have spanned almost all of the businesses in which the former Motorola competed: Mobile Devices, Government and Public Safety, Enterprise Mobility (formerly Symbol Technologies), and Networks.
 |
Volatiles Investigating Polar Exploration Rover
|
|
 |
Visual Environment for Robotic Virtual Exploration
|
|
 |
Autonomous Vehicle Management Systems |
|
 |
Resource Prospector
|
|
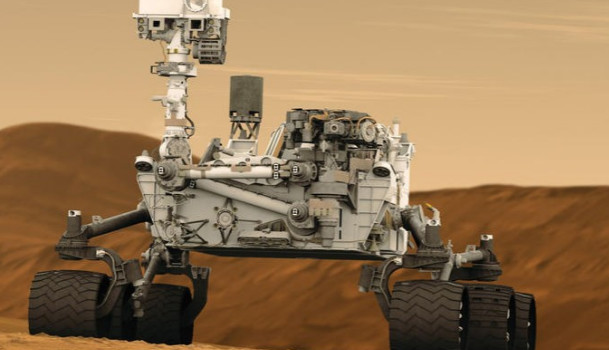 |
Robotic Exploration of Mars |
|
 |
GeocamSpace
|
|
 |
Sensor Data Analysis and AlgorithmsI worked on sensor data acquisition and processing for the Moto360 smart watch. I worked on photoplethysmographic heart rate detection and tracking. I also developed a FastSLAM-based indoor location solution utilizing particle filters to fuse dead reckoning and Wi-Fi sensor measurements. |
|
 |
I also developed statistical signal processing and sensor data analysis algorithms for MOTOACTV. I applied estimation theory, Bayesian techniques, and physiological research to develop algorithms to calculate physical activity parameters from a combination of stochastic sensor measurements. |
|
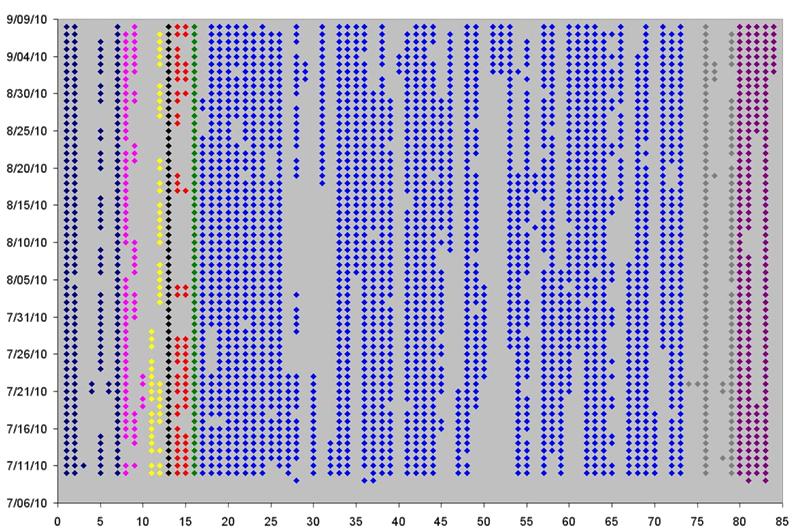 |
Data AnalyticsI was a principal member of the research team for Motorola’s new Advanced Services organization where I contributed to the development of multiple data analytics service offerings such as analyzing enterprise device data for power management applications, performance optimization, and device usage statistics. I also performed data mining on APCO P25 public safety network data to identify abnormal usage patterns. |
|
 |
Location SensingHow do you get an RFID reader to act as a range-finder? The general consensus was you had to use received signal strength indicators, but I approached the problem from a different perspective: control theory. I found a solution based on adaptive control of the reader’s transmission power that resulted in MaxLocator, a commercial range-finding solution ("pinpoint locationing technology") available on Motorola’s handheld RFID readers beginning with the MC3090-Z . This project was completed and transferred from research to development in record time and resulted in an initial order of 30,000 units. This work also led to the development of many other novel algorithms, including RFID direction-finding, tag tracking, tag grouping, and statistical estimation of tag populations. |
|
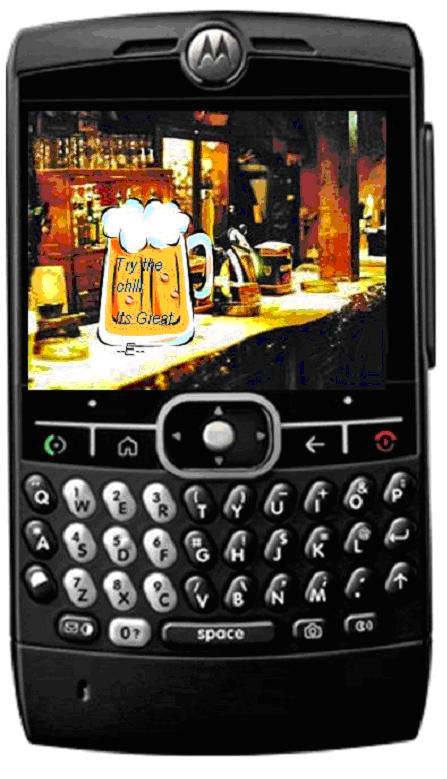 |
Mobile Augmented Reality MessagingThis project sought to apply telepresence technologies to mobile devices for personal communications. We developed a mobile messaging and social networking application developed for devices running JavaME/M3G and Android/OpenGL. The application allowed the placement of virtual objects with embedded multimedia content anywhere in the real world. I developed a geodetic model for markerless positioning of virtual content in mobile AR systems and investigated methods of linking and displaying dynamic, multimedia messages. An article on our Mobile Augmented Reality Messaging System appeared in Discover Magazine in 2008. This work was also submitted for a Wall Street Journal Technology Innovation Award. |
|
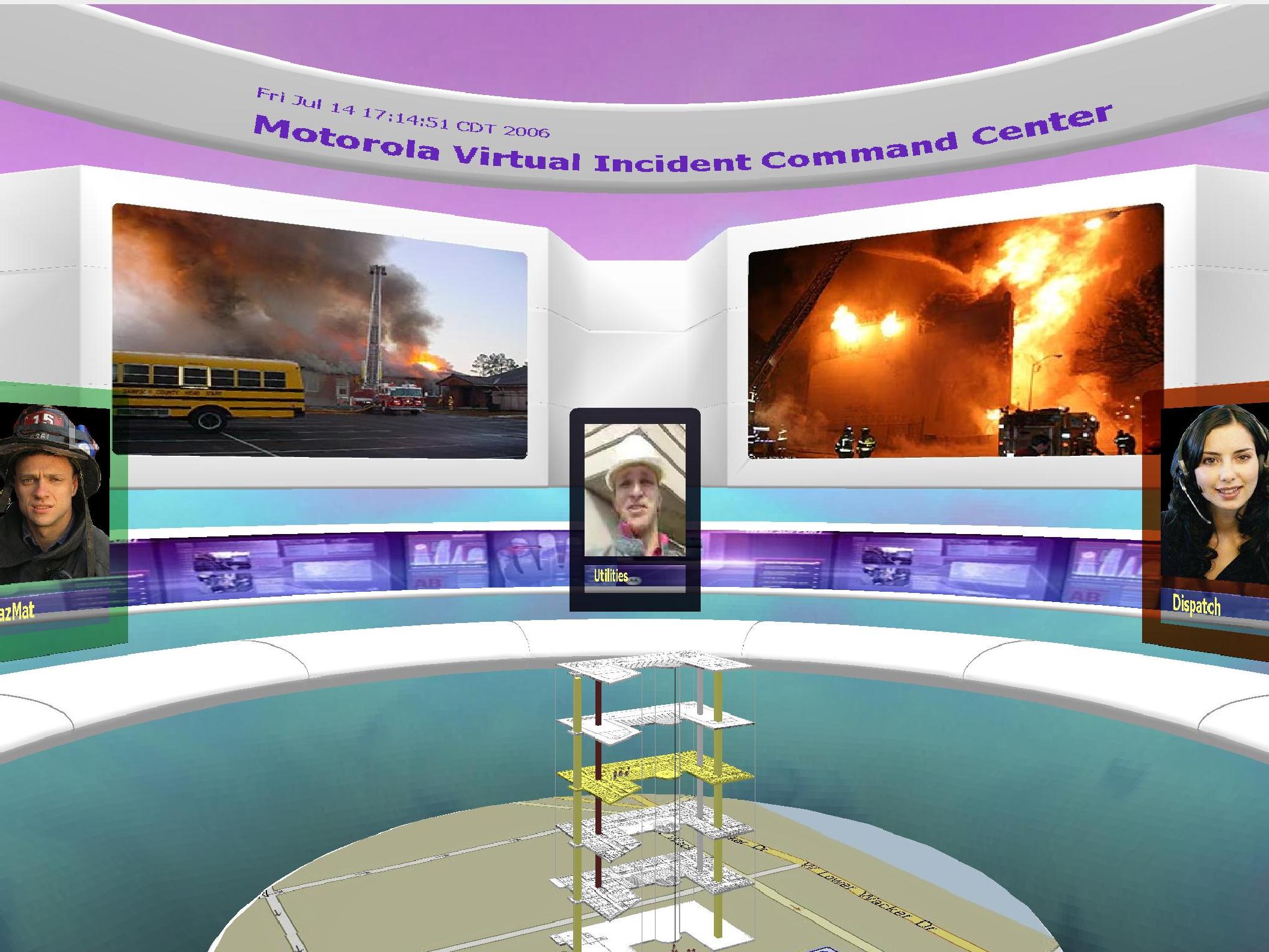 |
Public Safety TelepresenceI was part of a small research team investigating public safety applications of telepresence technologies. We developed a Virtual Incident Command Center (VICC) that combined national guidelines for incident management with many aspects of collaborative virtual environments to enable effective communication between first responders in the field and remotely located command personnel. A paper we published on VICC in 2008 had been among the 20 most downloaded papers from the Presence: Teleoperators and Virtual Environments website until 2012. Our telepresence research was rated sixth on a top ten list of highlights from Motorola's 2006 Innovation Showcase on Business 2.0's Third Screen blog. A presentation is available on YouTube. |
|
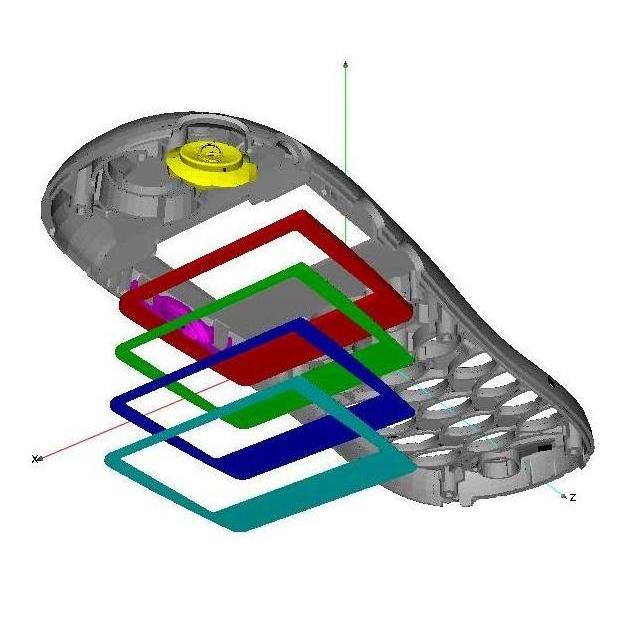 |
Data VisualizationCombining manufacturing and collaboration, this project enabled manufacturing engineers to visualize and annotate 3D mechanical CAD models of products to generate build documentation and animations to improve the efficiency of back-end manual assembly operations. I developed a software application using Java3D to display MCAD data using the STEP standard. The time required to generate assembly documentation was reduced by a factor of 10 (from days to hours.) |
|
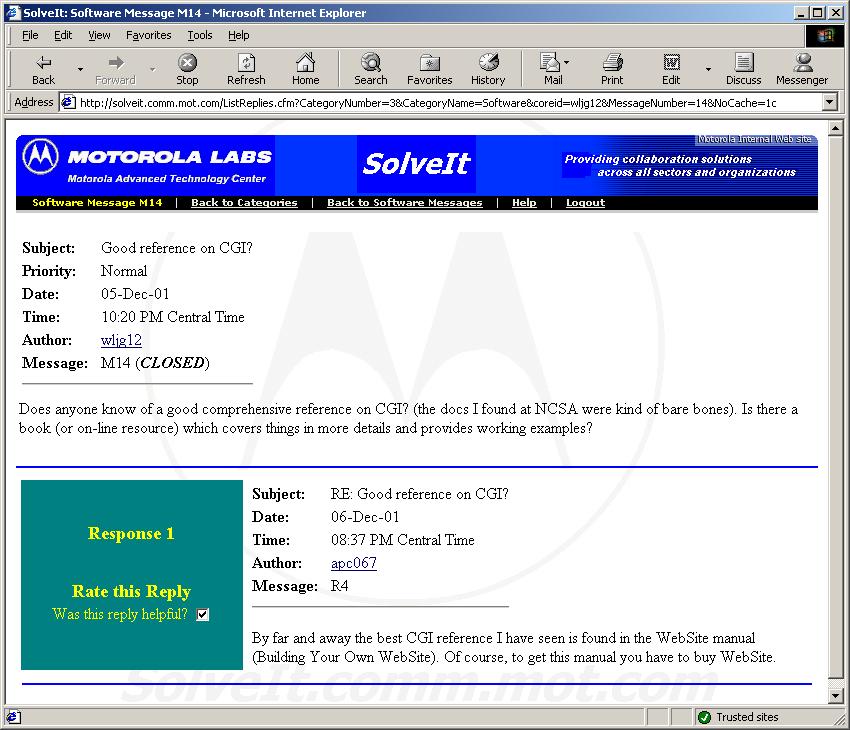 |
Web-Based CollaborationI co-conceived a web-based collaboration application to facilitate information exchange among the various groups and individuals in Motorola. I designed and implemented the entire system using an apache web server, Cold Fusion middleware, CGI login/authentication scripts, MS Access database, and HTML/CFML pages. Many features of this project were eventually incorporated into Motorola’s Expert Exchange system. |
|
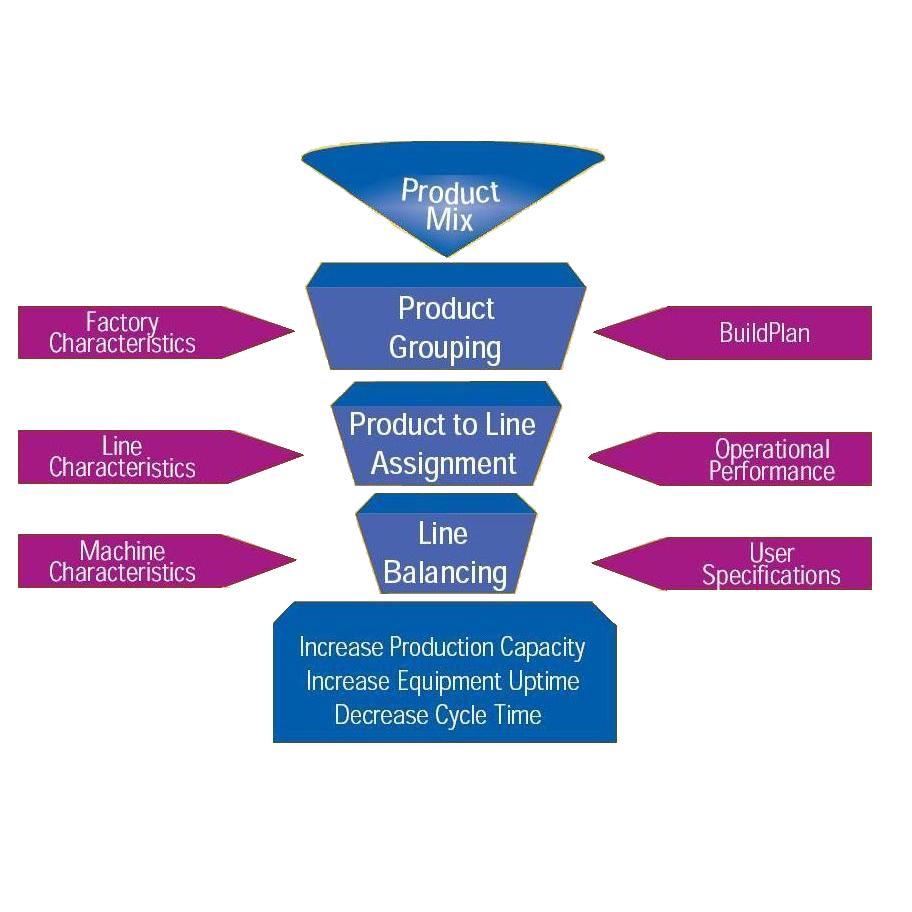 |
Manufacturing OptimizationThis project involved optimizing common front-end automated PCB assembly processes for Motorola's products by developing factory line and machine optimization algorithms via mixed integer linear programming models in C++. The resultant algorithms led to a 34% reduction in cycle time and an estimated savings of $25.5M. This work was commercialized and marketed externally under the name Manufacturing Balance. It was cross-licensed with Agilent to provide a complete solution for electronics manufacturers. |
|
 |
First Generation Smart PhoneA decade before the iPhone and Android, there was the Timeport P1088. This was Motorola’s first generation ARM-based smart phone that supported full PDA functionality, internet access, and supported over-the-air installation of Java apps. I was part of the hardware development team and designed digital logic, power, and ESD-compliant external interface circuitry. I analyzed the linearity of resistive touchscreens and helped to develop a calibration procedure for them. I performed worst-case analyses of the power management subsystems and performed prototype and certification testing. I developed an improved battery capacity indicator based on a polynomial discharge model. |
|
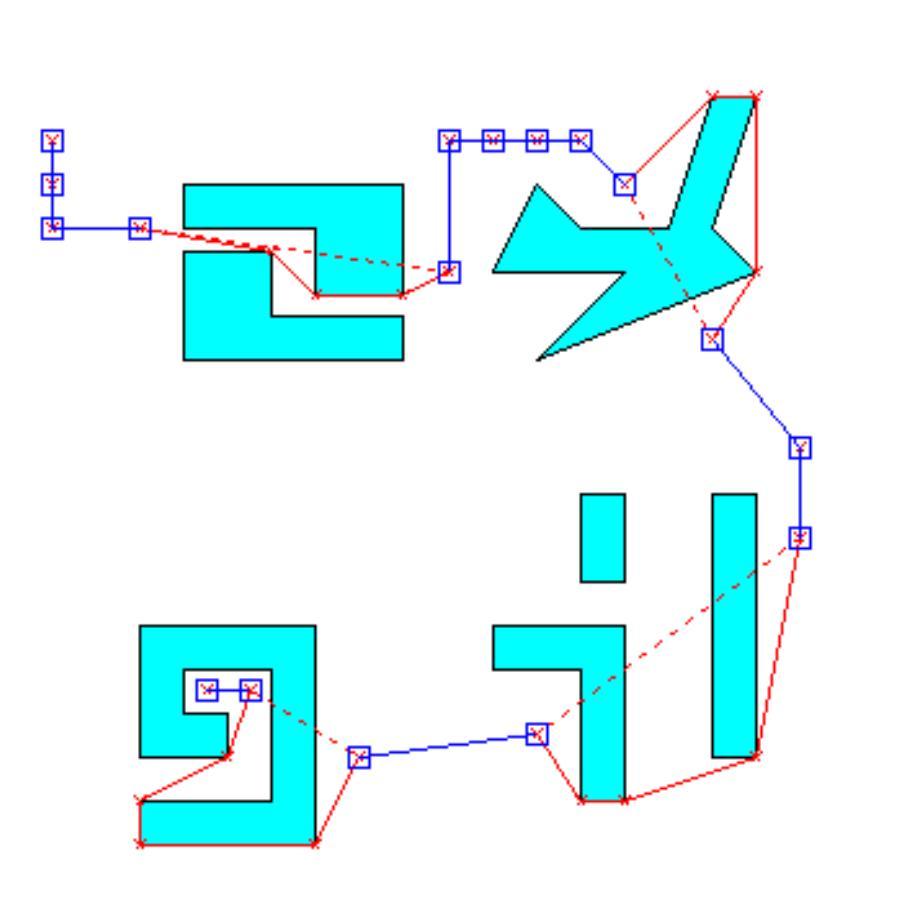 |
Robot Path and Motion PlanningMy dissertation involved coordinating the motions of multiple robots in a shared environment to plan collision-free paths for each robot. I have also investigated genetic algorithm formulations of several variations of the path planning problem ranging from PCB assembly to printed electronics manufacturing. |
|
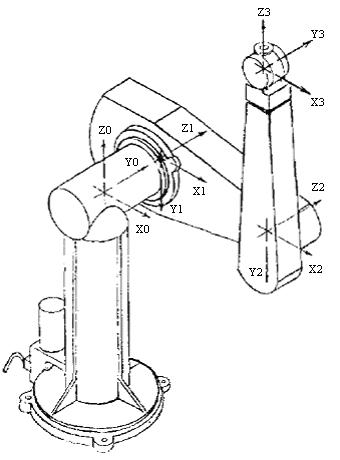 |
Robot Arm SimulationI have written simulators for the Puma 560 robot arm in C, C++, Java, and MATLAB. The Puma 560 was a de facto standard for academic research for some time. The inverse dynamics are solved using Luh, Walker, and Paul’s recursive Newton-Euler algorithm and the forward dynamics are calculated using Walker and Orin’s algorithm. This simulator has been used in developing and testing path planning and control algorithms. |
|